
Jovem de 15 anos constrói tartaruga robótica usando inteligência artificial que detecta ameaças na água com 96% de precisão
O projeto usou impressão 3D, Raspberry Pi e movimentos inspirados em tartarugas reais para monitorar ambientes aquáticos sem hélices

Um adolescente de 15 anos estava em um acampamento em Ontário quando observou uma tartaruga-mordedora deslizando pela água quase sem perturbar o ambiente ao redor. Aquele momento de atenção virou um projeto científico. Meses depois, Evan Budz havia construído uma tartaruga robótica com inteligência artificial capaz de detectar ameaças subaquáticas com 96% de precisão, e vencido cientistas de 40 países.
Como um adolescente criou uma tartaruga robótica do zero
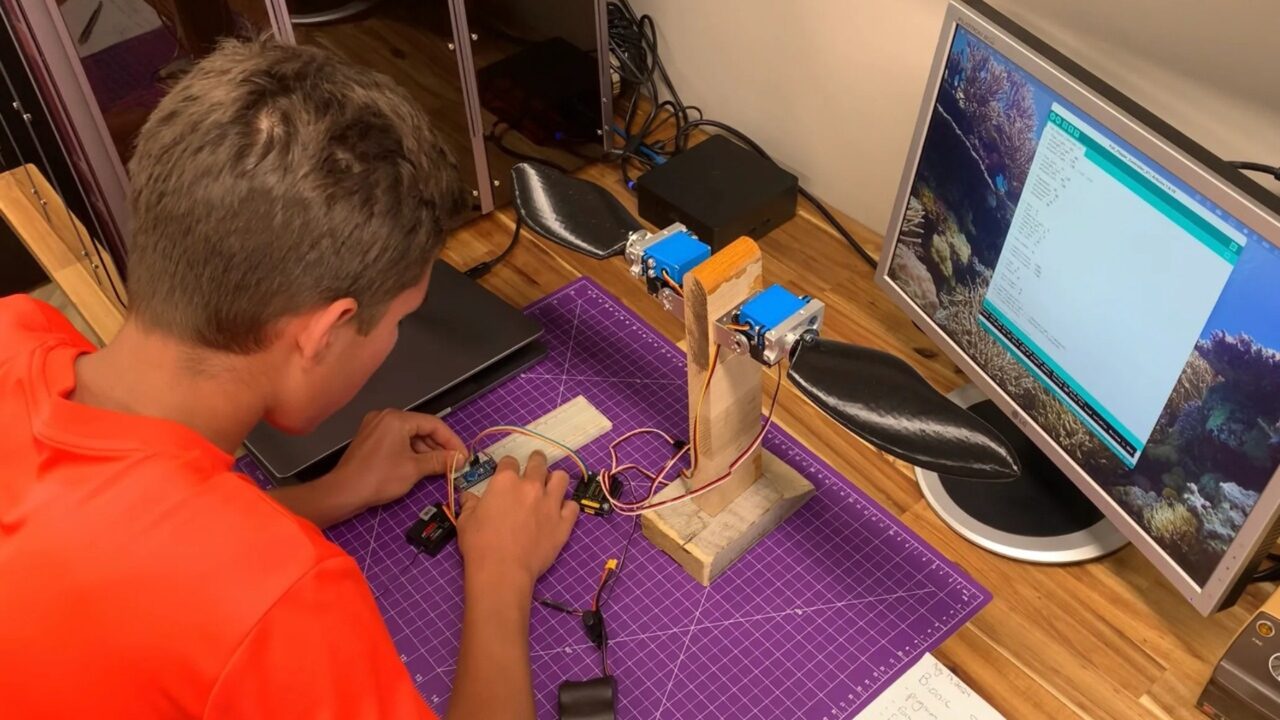
O dispositivo criado por Budz se chama BURT (Tartaruga Robótica Subaquática Biônica) e foi modelado com base na mecânica real de nado de tartarugas-verdes. A maior parte do desenvolvimento aconteceu na piscina do quintal dos avós, com pouco mais de dois metros e meio de profundidade. Budz estudou a locomoção dos animais assistindo vídeos e consultando especialistas de um aquário local, aprendendo como as tartarugas usam as nadadeiras dianteiras para propulsão e os membros traseiros para direção.
O robô foi projetado no software CAD 3D SolidWorks e teve seus componentes impressos em 3D pelo próprio inventor. O corpo é um tubo de acrílico que abriga um microcomputador Raspberry Pi, responsável pelos modelos de inteligência artificial e pela transmissão de dados. Sensores externos controlam profundidade, navegação por GPS, detecção de obstáculos e uma câmera frontal envia dados visuais para o sistema integrado.
Por que o BURT foi projetado para se mover como uma tartaruga de verdade
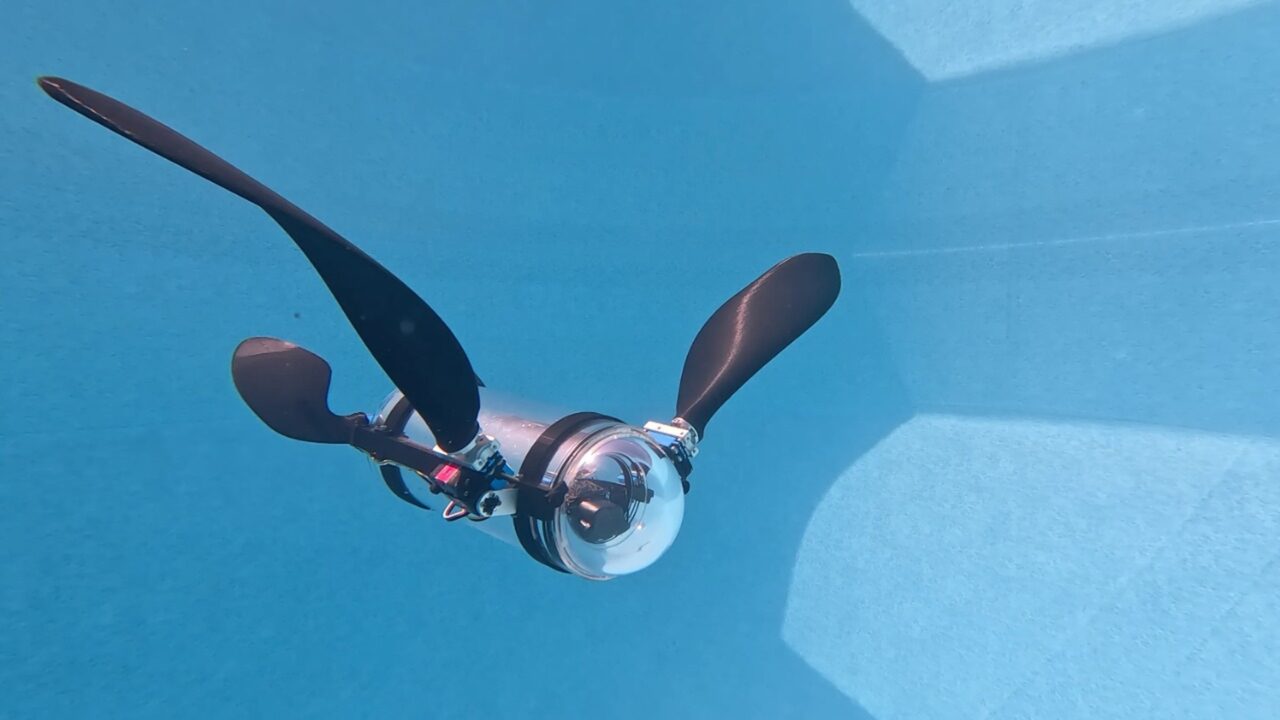
A escolha do movimento não foi estética. A maioria dos drones subaquáticos usa hélices ou jatos de água de alta pressão que podem erodir habitats delicados e estressar a vida marinha. Budz queria algo que coletasse dados sem causar os danos que a tecnologia convencional às vezes provoca. O movimento suave das nadadeiras resolve esse problema de forma elegante.
O BURT pesa cerca de 5 kg, com lastro metálico para atingir flutuabilidade neutra. Funciona por até oito horas com uma bateria de lítio, com autonomia ampliada por um painel solar. A velocidade padrão é de aproximadamente 800 metros por hora, o ritmo típico de uma tartaruga real, embora a frequência das batidas das nadadeiras possa ser ajustada para aumentar o desempenho.
Leia também: O enigma que intrigou físicos por décadas e acabou revelando uma resposta simples nas próprias sondas
Quais ameaças subaquáticas o robô consegue detectar
O sistema de detecção do BURT foi treinado para identificar diferentes categorias de risco ambiental. Na piscina dos avós, Budz construiu um recife de coral simulado com modelos 3D e programou o robô para reconhecer padrões de branqueamento. Os resultados dos testes mostraram 96% de precisão na detecção. As categorias de monitoramento desenvolvidas até agora incluem:
- Branqueamento de corais, identificado por padrões visuais captados pela câmera frontal
- Espécies invasoras, reconhecidas por características específicas no ambiente aquático
- Microplásticos, detectados por um sistema de imagem holográfica que classifica partículas microscópicas na água com o apoio de uma rede neural treinada especificamente para essa função
- Obstáculos em água turva, identificados por um transdutor ultrassônico que usa ondas sonoras de alta frequência
O robô opera de forma autônoma seguindo uma grade de busca predeterminada, sem necessidade de cabo ou operador remoto. Todos os dados são transmitidos para o Raspberry Pi e podem ser enviados externamente em tempo real.
Quais prêmios o projeto conquistou em competição internacional
Em setembro de 2025, Budz levou o primeiro prêmio no Concurso da União Europeia para Jovens Cientistas (EUCYS), realizado em Riga, Letônia, competindo ao lado de jovens de 14 a 20 anos de 40 países, e recebeu €7.000 como premiação. Antes disso, já havia vencido o prêmio de Melhor Projeto na categoria Inovação na Feira de Ciências do Canadá de 2025, que reuniu cerca de 25.000 competidores. Ele também recebeu o prêmio Ellison Scholars, que inclui uma visita à Universidade de Oxford com todas as despesas pagas.
“Meus pais me criaram com o princípio de que todo lugar que eu visito, devo deixá-lo um pouco melhor do que o encontrei”, disse Budz à Popular Science. Essa filosofia está na base do projeto desde o início e explica por que a escolha pelo movimento suave das nadadeiras nunca foi negociável.
O que o BURT representa para o futuro do monitoramento oceânico
O objetivo declarado de Evan Budz é implantar uma frota de robôs como o BURT para monitorar ambientes aquáticos em escala, identificando ameaças antes que se tornem irreversíveis. Em um momento em que os recifes de coral enfrentam colapso acelerado pelo aquecimento dos oceanos e os microplásticos já foram detectados nos pontos mais profundos do planeta, ter um equipamento silencioso, autônomo e preciso pode mudar a forma como cientistas entendem e protegem esses ecossistemas.
Um adolescente com acesso a uma piscina, uma impressora 3D e uma observação feita em um acampamento conseguiu construir algo que laboratórios inteiros ainda não entregaram. Se o BURT for o ponto de partida, o que vem a seguir pode ser ainda mais impressionante. E vale lembrar: Evan Budz ainda tem muito tempo pela frente.
Os comentários não representam a opinião do site; a responsabilidade pelo conteúdo postado é do autor da mensagem.
Comentários (0)